මෑතකදී, JSR හි පාරිභෝගික මිතුරෙකු රොබෝ වෙල්ඩින් පීඩන ටැංකි ව්යාපෘතියක් අභිරුචිකරණය කළේය. පාරිභෝගිකයාගේ වැඩ කොටස්වල විවිධ පිරිවිතරයන් ඇති අතර වෑල්ඩින් කිරීමට බොහෝ කොටස් තිබේ. ස්වයංක්රීය ඒකාබද්ධ විසඳුමක් නිර්මාණය කිරීමේදී, පාරිභෝගිකයා අනුක්රමික වෙල්ඩින් කරන්නේද නැතහොත් ස්ථාන වෙල්ඩින් කරන්නේද යන්න තහවුරු කර පසුව රොබෝව සම්පූර්ණයෙන්ම භාවිතා කරන්නේද යන්න තහවුරු කිරීම අවශ්ය වේ. කළ යුතුය. මෙම කාල පරිච්ෙඡ්දය තුළ, ස්ථානගත කරන්නා තෝරා ගැනීම පිළිබඳව ඔහුට සැකයක් ඇති බව මට පෙනී ගියේය, එබැවින් JSR එය කෙටියෙන් සැමට හඳුන්වා දුන්නේය.
ද්විත්ව ස්ථාන තනි අක්ෂ හෙඩ්ස්ටොක් සහ ටේල්ස්ටොක් සිරස් ෆ්ලිප් ස්ථානගත කරන්නා
VS ත්රි-අක්ෂ සිරස් ෆ්ලිප් ස්ථානගත කරන්නා
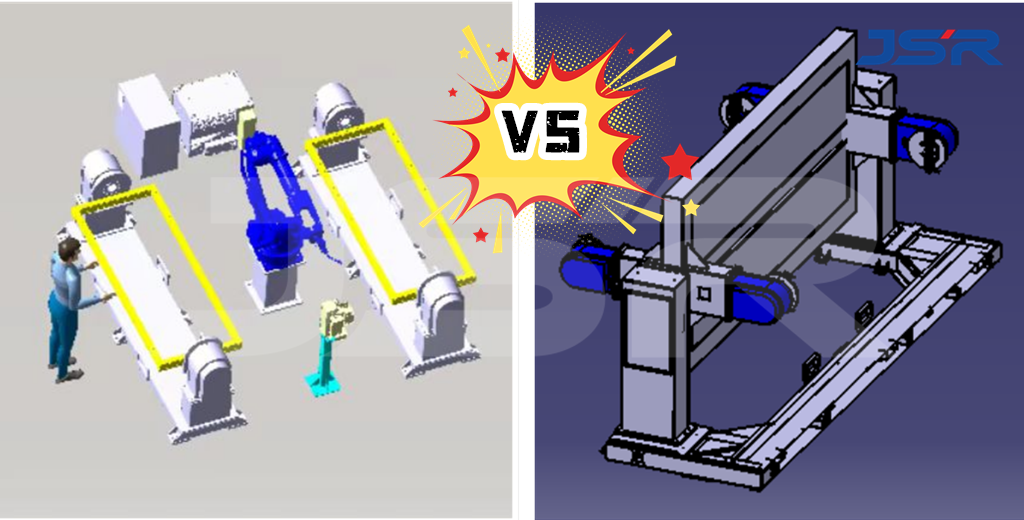
රොබෝ වෙල්ඩින් වැඩපොළේ, ද්විත්ව ස්ථාන තනි-අක්ෂ හෙඩ්ස්ටොක් සහ ටේල්ස්ටොක් සිරස් ෆ්ලිප් ස්ථානගත කරන්නා සහ අක්ෂ තුනේ සිරස් ෆ්ලිප් ස්ථානගත කරන්නා පොදු ස්ථානගත කිරීමේ උපකරණ දෙකක් වන අතර, විවිධ යෙදුම් අවස්ථා වලදී ඒවාට තමන්ගේම වාසි ඇත.
පහත දැක්වෙන්නේ ඒවායේ යෙදුම් අවස්ථා සහ සංසන්දනයන් ය:
ද්විත්ව ස්ථාන තනි අක්ෂ හිස සහ වලිග රාමු ස්ථානගත කරන්නා:
වෙල්ඩින් ක්රියාවලියේදී වැඩ කොටස භ්රමණය කර ස්ථානගත කළ යුතු අවස්ථා සඳහා එය සුදුසු වේ. උදාහරණයක් ලෙස, මෝටර් රථ බඳ වෙල්ඩින් නිෂ්පාදන රේඛාවේ, එකවර ස්ථාන දෙකක වැඩ කොටස් දෙකක් ස්ථාපනය කළ හැකි අතර, වැඩ කොටස්වල භ්රමණය සහ ස්ථානගත කිරීම තනි අක්ෂ හිසක් සහ වලිග කොටස් ස්ථානගත කරන්නෙකු හරහා ලබා ගත හැකි අතර එමඟින් නිෂ්පාදන කාර්යක්ෂමතාව වැඩි දියුණු වේ.
https://youtube.com/shorts/JPn-iKsRvj0
අක්ෂ තුනේ සිරස් ෆ්ලිප් ස්ථානගත කරන්නා:
බහු දිශාවලට භ්රමණය වන සහ පෙරලන වැඩ කොටස් අවශ්ය වන සංකීර්ණ වෙල්ඩින් අවස්ථා සඳහා වඩාත් සුදුසුය. උදාහරණයක් ලෙස, අභ්යවකාශ කර්මාන්තයේ දී, ගුවන් යානා බඳ කොටස් සංකීර්ණ වෑල්ඩින් කිරීම අවශ්ය වේ. අක්ෂ තුනේ සිරස් ෆ්ලිප් ස්ථානගත කරන්නාට විවිධ කෝණවලින් වෙල්ඩින් අවශ්යතා සපුරාලීම සඳහා තිරස් සහ සිරස් දිශාවන්හි බහු-අක්ෂ භ්රමණය සහ වැඩ කොටස පෙරළීම සාක්ෂාත් කරගත හැකිය.
https://youtu.be/v065VoPALf8 👇
වාසි සංසන්දනය:
ද්විත්ව ස්ථාන තනි අක්ෂ හිස සහ වලිග රාමු ස්ථානගත කරන්නා:
- සරල ව්යුහය, ක්රියාත්මක කිරීමට සහ නඩත්තු කිරීමට පහසුය.
- නිෂ්පාදන කාර්යක්ෂමතාව වැඩි දියුණු කිරීම සඳහා එකවර වැඩ කොටස් දෙකක් සැකසිය හැක.
- තනි අක්ෂයක භ්රමණයක් අවශ්ය වන වැඩ කොටස් වැනි සරල වෙල්ඩින් කාර්යයන් සඳහා සුදුසු වේ.
- මිල අක්ෂ තුනේ සිරස් ෆ්ලිප් ස්ථානගත කරන්නාට වඩා ලාභදායී වේ.
- වෑල්ඩින් කිරීම වම් සහ දකුණු ස්ථාන අතර මාරු කරනු ලැබේ. එක් ස්ථානයක වෑල්ඩින් කරන විට, සේවකයින්ට අනෙක් පැත්තෙන් ද්රව්ය පැටවීම සහ බෑම සිදු කිරීමට සිදුවේ.
අක්ෂ තුනේ සිරස් ෆ්ලිප් ස්ථානගත කරන්නා:
- එය බහු-අක්ෂ භ්රමණය සහ පෙරළීම සාක්ෂාත් කරගත හැකි අතර සංකීර්ණ වෙල්ඩින් කාර්යයන් සඳහා සුදුසු වේ.
- රොබෝ වෑල්ඩින් කිරීමේදී, සේවකයින්ට අවශ්ය වන්නේ එක් පැත්තකින් පමණක් වැඩ කොටස් පැටවීම සහ බෑම සම්පූර්ණ කිරීමයි.
- විවිධ වෙල්ඩින් කෝණවල අවශ්යතා සපුරාලිය හැකි, වැඩි ස්ථානගත කිරීමේ නම්යශීලීභාවයක් සහ නිරවද්යතාවයක් සපයයි.
- ඉහළ වෙල්ඩින් ගුණාත්මකභාවය සහ නිරවද්යතා අවශ්යතා සහිත වැඩ කොටස් සඳහා සුදුසු වේ.
සාරාංශගත කිරීම සඳහා, සුදුසු ස්ථානගත කරන්නෙකු තෝරා ගැනීම වැඩ කොටස සංකීර්ණත්වය, වෙල්ඩින් කෝණය, නිෂ්පාදන කාර්යක්ෂමතාව සහ වෙල්ඩින් ගුණාත්මක අවශ්යතා වැනි සාධක ඇතුළුව නිශ්චිත වෙල්ඩින් කාර්ය අවශ්යතා මත රඳා පවතී.
පළ කිරීමේ කාලය: පෙබරවාරි-20-2024
